- Utilized a pre-trained denoising auto-encoder as a feature extractor for the task of road map construction.
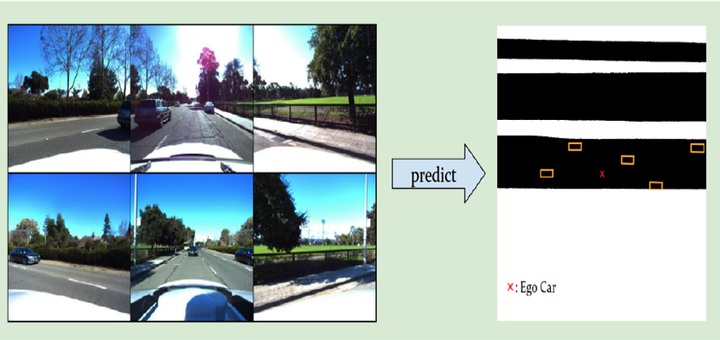
- Combined the feature embeddings of the multi-view scene captured from moving vehicles and used a U-Net to generate a top-down view of the binary road map.
- Achieved a threat score of 0.70 on the hold-out test set (with the best score in the intra-class competition being ~0.81).